Duluth Double DECCer
In Minnesota, the week 2 events were the Lake Superior Regional and the Northern Lights Regional, both held in the Duluth Entertainment Convention Center (the DECC).
Our observations include:
- All roboRIOs had to be re-imaged to version FRC_roboRIO_2019_v14. This update was released after stop-build day, so every bagged robot had to be updated.
If you haven’t yet attended your first 2019 competition, you can prepare for this by updating your laptops with the FRC Update 2019.2.0.
If you are helping teams at competition with this, it might be a little quicker to give them the FRC_roboRIO_2019_v14 file and reimage their RIO. - All Java and C++ projects had to be updated to GradleRIO version 2019.4.1. GradleRIO version changes always require inital software downloads, so the first build after changing your version must be done while connected to the internet. It’s far better to do this before the competition, while you have a good network connection.
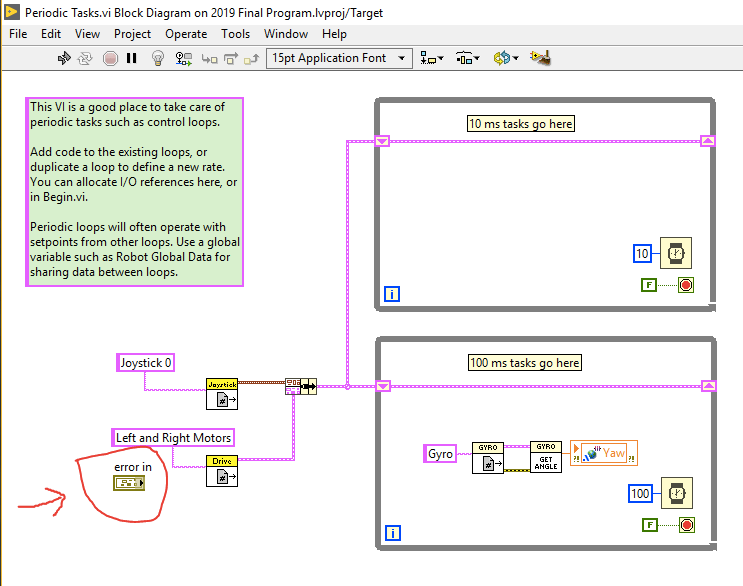
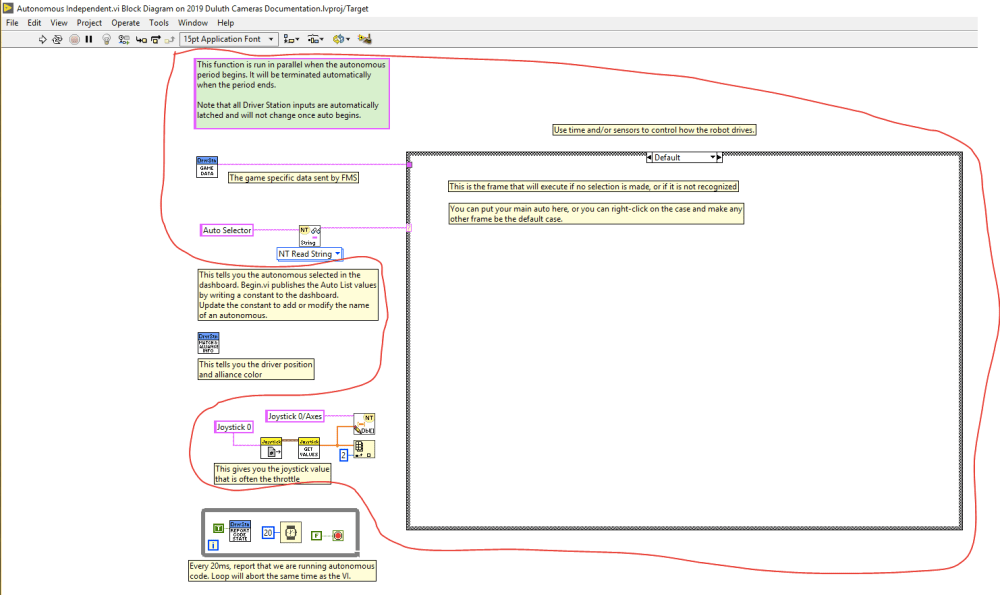
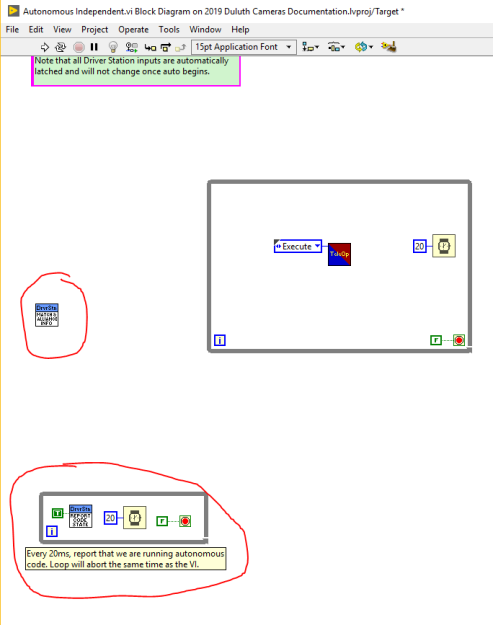
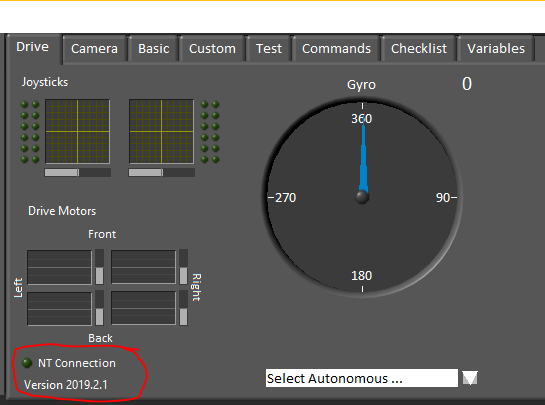
If you are helping teams at the competition, you can give them the latest WPILib update. This update will install all the latest GradleRIO dependencies, minimizing download time. - We were expecting camera problems for LabView. At Duluth, Brandon and Logon did extra duty for all the Labview teams.
- Two teams who had programmed their robot in Eclipse with the 2018 version of WPILib.
Fortunately, this was easy to fix. We installed the latest WPILib to their laptops and then used the import wizard to convert their projects to GradleRIO. - As usual, plenty of teams suffered from loose electrical connections.
Pull-test all your connections; nothing should come loose. All the wires to your batteries, circuit breaker, and PDP should be completely immovable. - If using the Limelight camera, consider their bandwidth best practices.
- If you are using a Limelight and / or frcvision on Raspberry PI, consider bringing an ethernet switch in order to assist troubleshooting.
- Turn off the firewall on your laptops.