2019 Camera report
Lake Superior Regional and Northern Lights Regional (Duluth, Minnesota)
The following is a report from the Duluth CSA’s on cameras and the dashboard. As of Saturday Afternoon (Week 2) we have experienced 100% success rate of cameras performing between the 123 teams split between the 2 regionals. Our procedure to get this result will be outlined below.
If the team camera works, we let them go without any changes. This usually included the Limelight, Raspberry Pi, ShuffleBoard, and SmartDashboard. These presented very little problems with the FMS and NT.
For teams encountering issues, LabVIEW teams or teams using a LabVIEW dashboard, the following procedure was done in the pits. If the team was able to connect after any of these steps tethered to the robot we sent them out to the field.
In the Pits:
1. Download the 2019.2.1 LabVIEW Dashboard.
This would get passed on by a flash drive to the team’s driver station from a CSA. The folder would be placed on the desktop with the following path :
C:\Users\pcibam\Desktop\FRC_Dashboard\Dashboard.exe
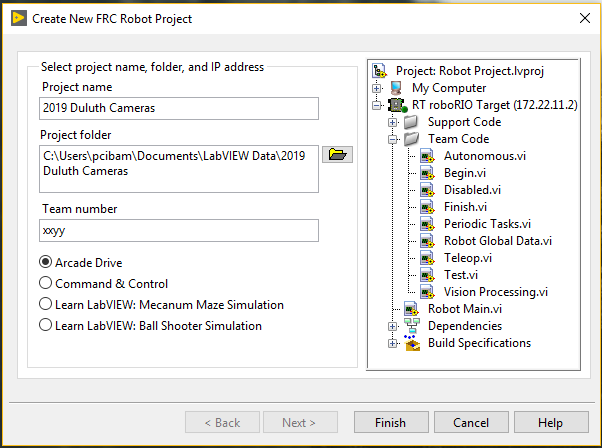
2. If LabVIEW team, convert their code to a fresh 2019.2 Project as follows. All projects were named 2019 Duluth Cameras so we could determine which teams we applied this to. Always save when prompted to during this conversion.
a) Start a brand new project like normal
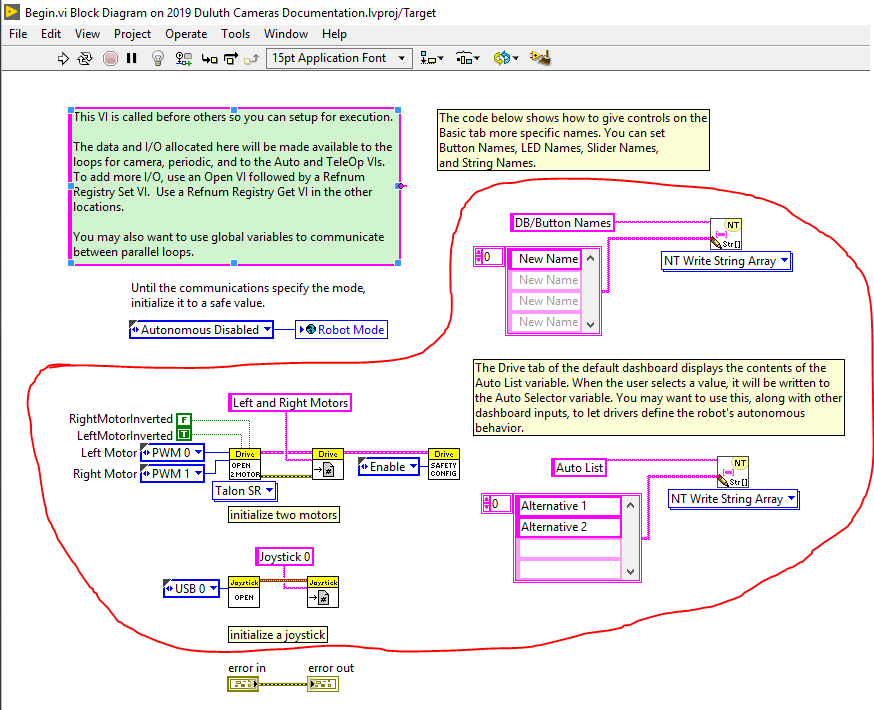
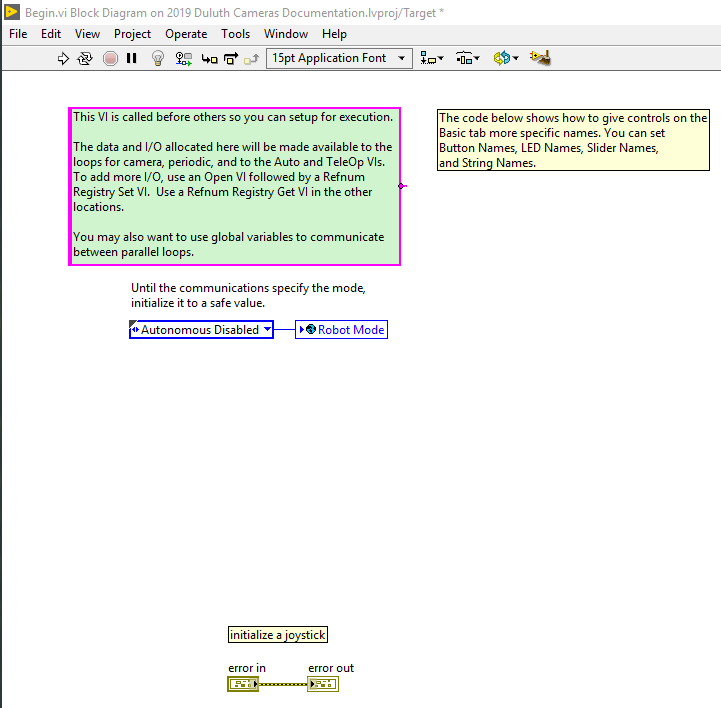
b) Delete the following from the begin VI. Once cleared it will look as follows. (Old Code)
Cleaned (Old Code)
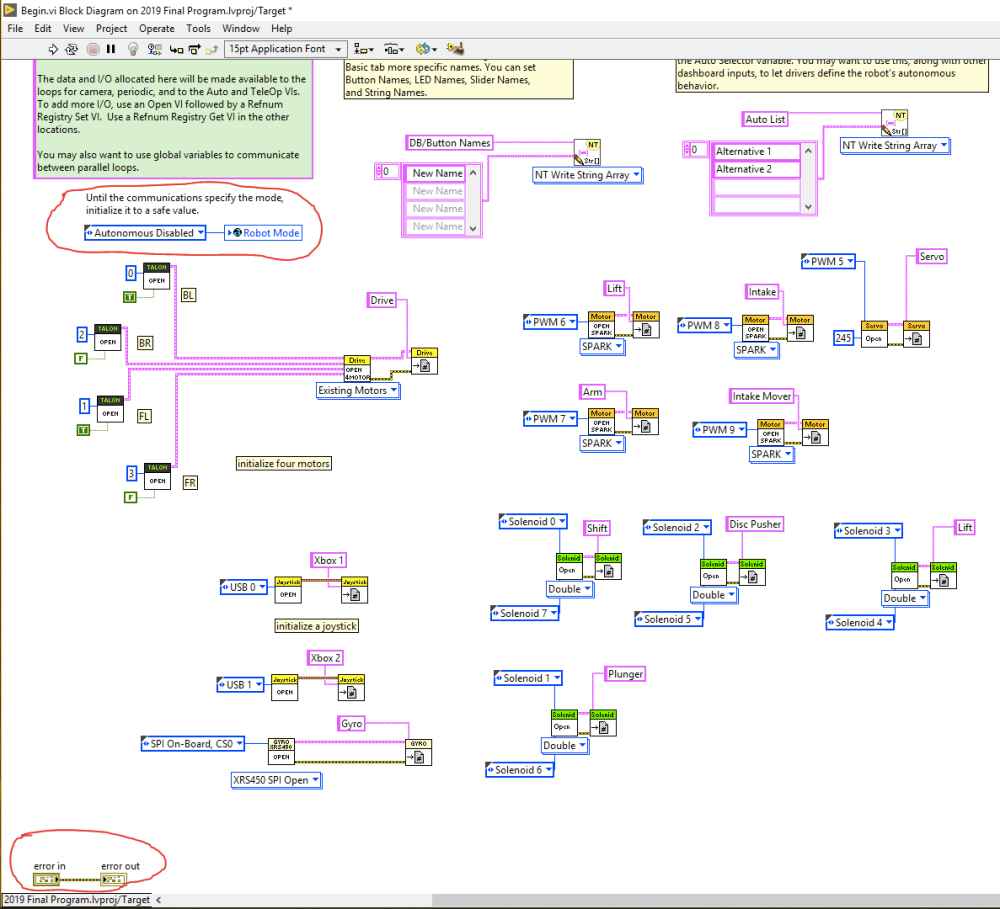
c) Copy everything except the following from begin. (Old Code) and paste in New Code
d) Delete the following from Teleop. (New Code)
Cleaned
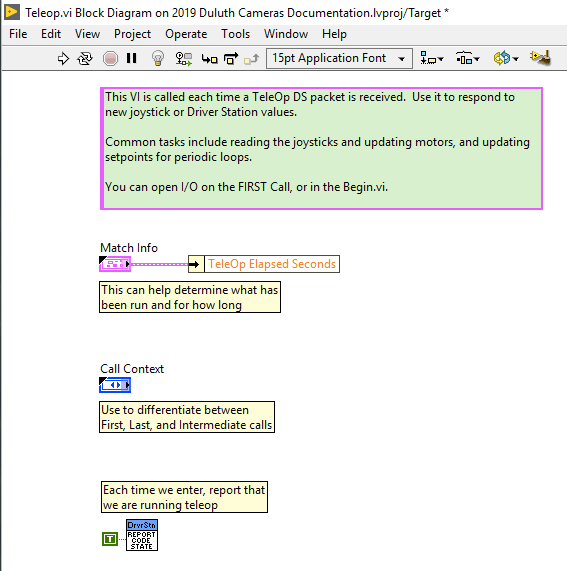
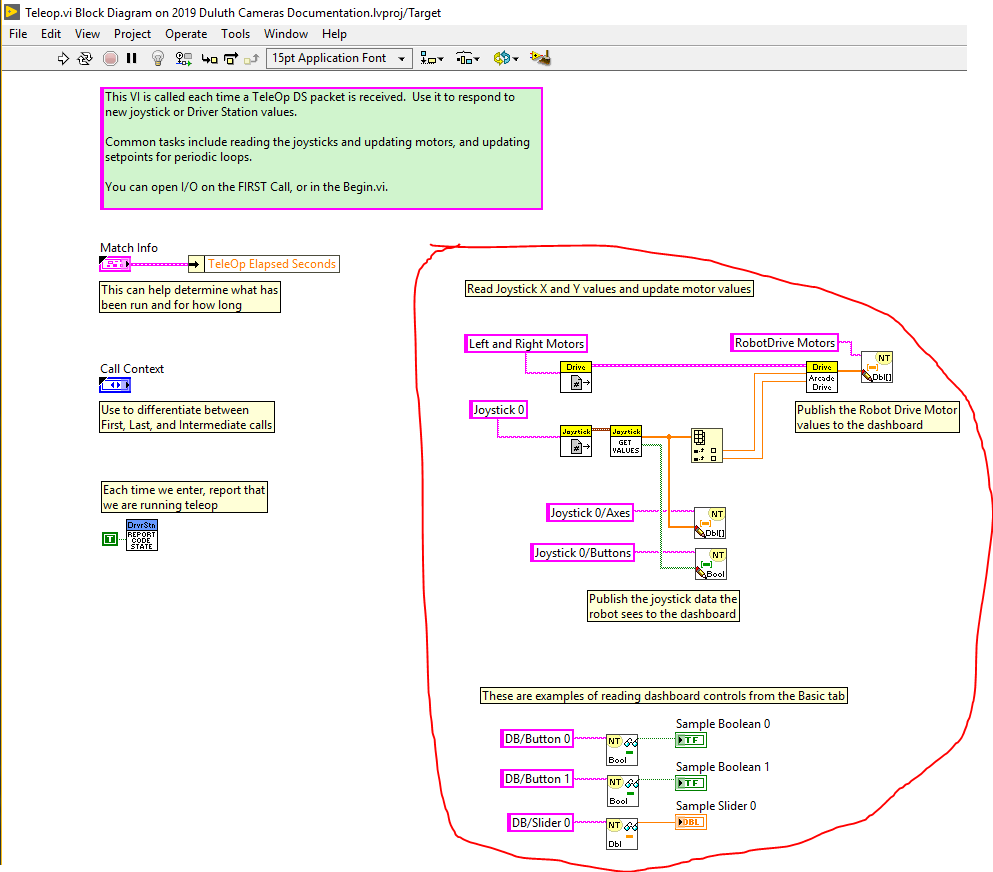
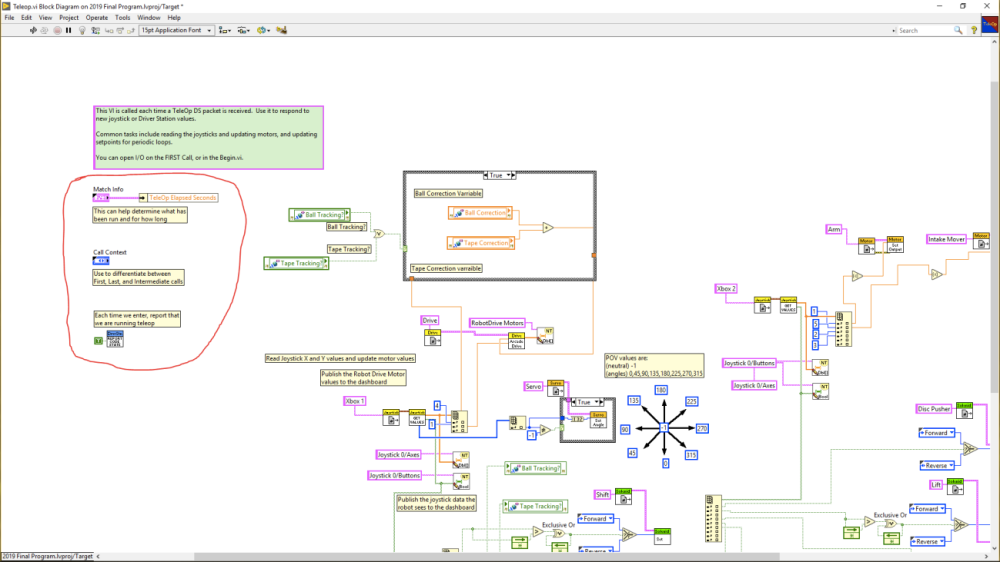
e) Copy everything except the following from Teleop (Old Code) and paste in New code
f) Delete the following from Periodic Task (New Code)
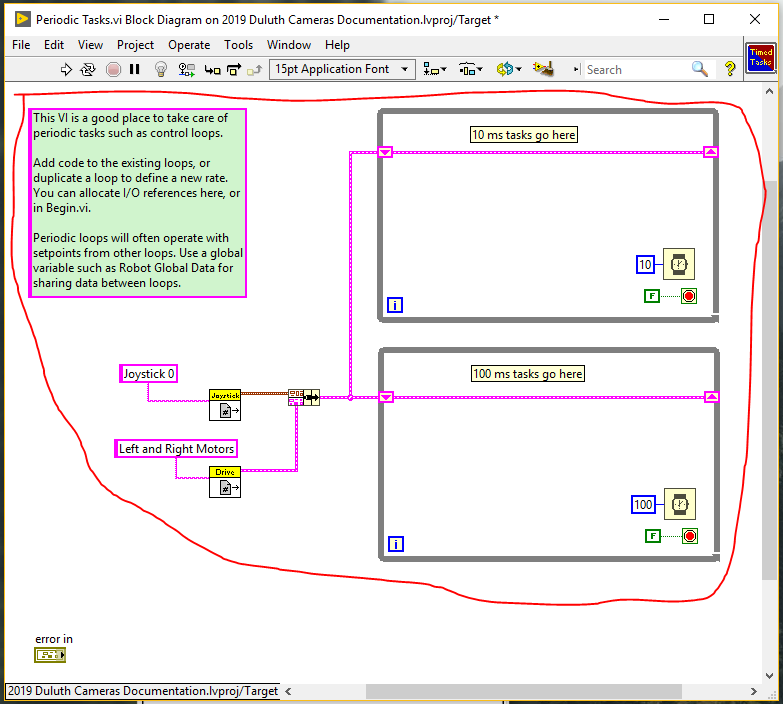
Cleaned
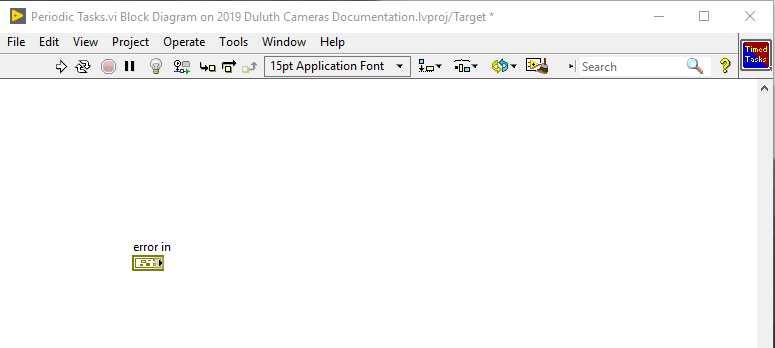
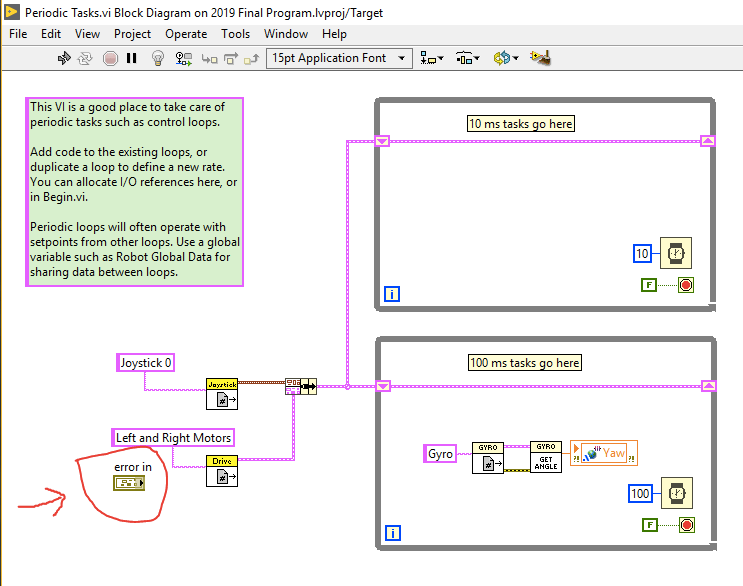
g) Copy everything except the following from Periodic Task (Old Code) and paste in New code
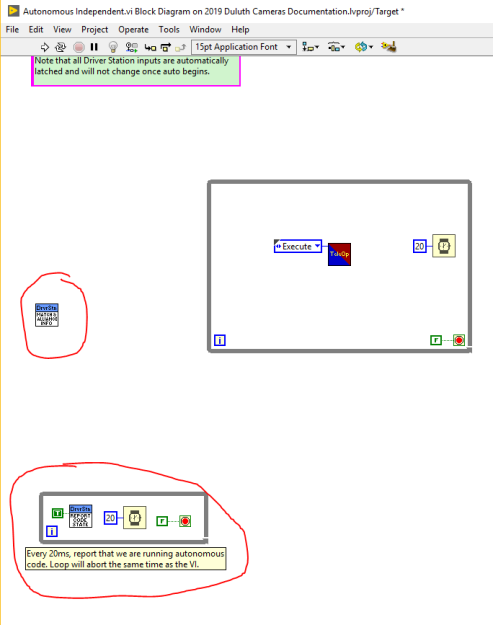
h) Delete the following from Autonomous Independent (New Code)
Cleaned
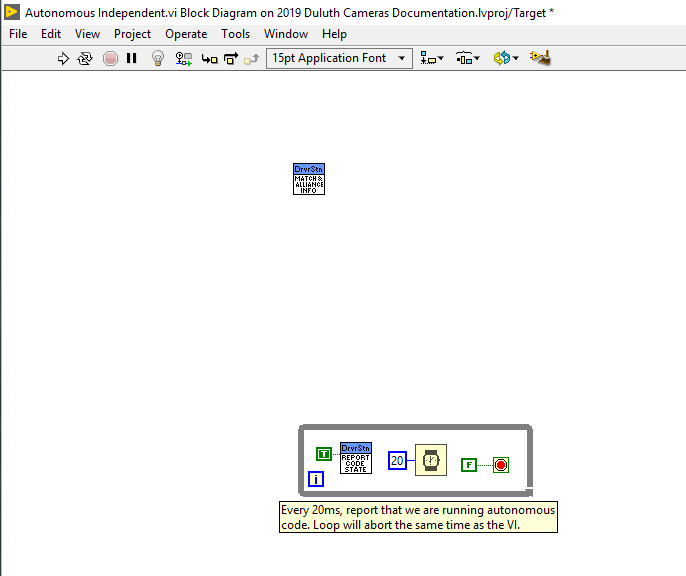
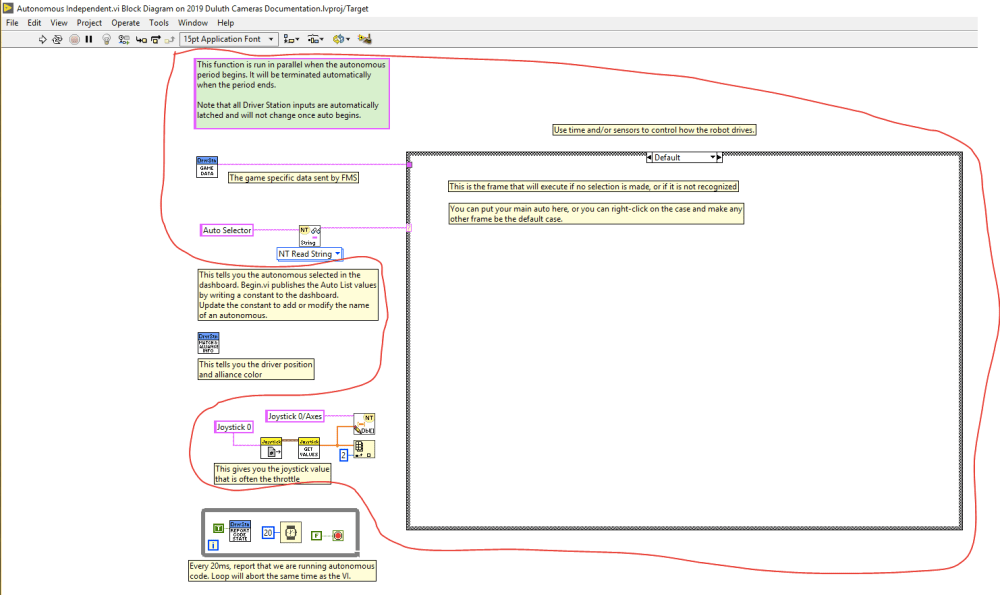
i) Copy everything except the following from Autonomous Independent (Old Code) and paste in New code
We have not discovered what to do with robot global variables at this time. To be on the safe side teams should recreate these in the new project and link them to the appropriate locations manually.
On the field:
Check if NT Communication Light is on
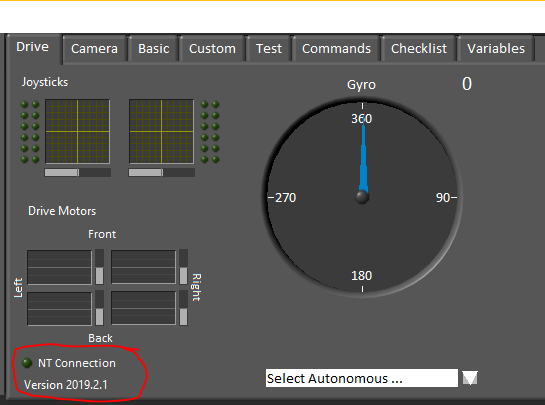
Once that light is green do the following:
- If one camera, select the camera and wait. On average it would take about 7 seconds to connect.
- If 2 cameras, select the second camera first. Let this camera boot up. Then select the first camera. It does not matter which side that cameras are on. Each camera on average would take 7 seconds.
If you have any question feel free to contact me at the information below. I hope this helps for future events! We will be doing the same procedure at the Great Northern Regional (North Dakota) and will report back with results from that regional.
Brandon A. Moe
University of Minnesota – Duluth, 2020 Minnesota CSA
FRC Team 7432 NOS Mentor
Personal: moexx399@d.umn.edu
